Что делают роботы на стройке

Представьте себе такую картину. Вечереет. На стройке нового многоэтажного дома закончилась дневная смена, и рабочие расходятся по домам. В этот момент в подъезде появляется агрегат размером не больше детской коляски. Это робот. Без всякого человеческого участия он ползёт на только что построенный этаж. С точностью, недостижимой для человека, робот оценивает работу, выполненную за дневную смену, сравнивает сделанное с рабочими чертежами и находит любые отклонения, даже на миллиметр. Проходит немного времени, и в «голове» робота готов отчёт, который утром окажется в компьютере прораба. В отчёте будет указано, что сделано, что нужно доделать или переделать. Заодно будет составлен план работ на новый день. Сказка? Вовсе нет! Такие роботы-контроллеры трудятся уже на многих стройках. И это результат цифровой революции в строительстве.
Как устроен робот-контроллер
Всё, что нужно для создания такого робота, — найти подходящую самодвижущуюся платформу и установить на неё 3D-сканер — устройство получения объёмного изображения окружающего ландшафта или интерьера в цифровом виде.
Платформа строительного робота-контроллера должна быть достаточно компактной, чтобы проходить в любые дверные проёмы и протискиваться в узкие проходы подвалов и чердаков. Кроме того, она должна уметь взбираться по строительным пандусам и лестницам, даже самым крутым, а также обладать достаточной грузоподъёмностью, чтобы возить на себе сканер и другое оборудование. Важнейшая функция — способность работать автономно, то есть «видеть» обстановку вокруг себя, планировать свой маршрут, фиксировать в памяти координаты перемещения, маневрировать и объезжать препятствия и при этом трудиться по несколько часов на своих аккумуляторах без подзарядки.
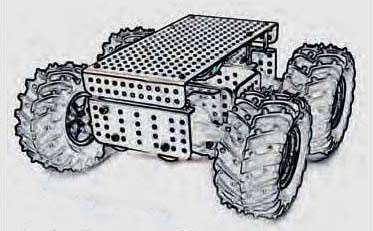
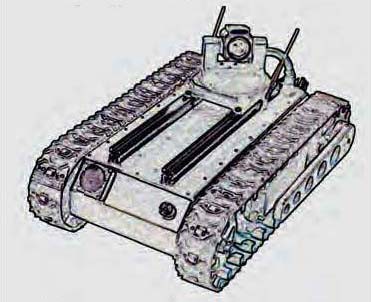
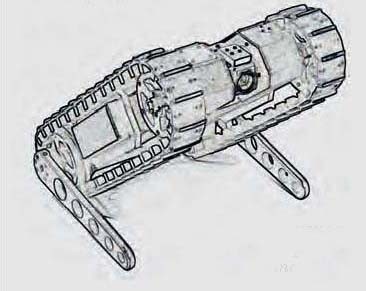
Шасси для платформы бывают двух типов: колёсные и гусеничные. Если нужно, чтобы робот преодолевал очень высокие препятствия, то конструкцию можно оснастить специальными поворотными флипперами («ластами»), ставящими платформу практически «на попа».
Сердце робота-контроллера — 3Dсканер. До его появления строители прошлых поколений для документирования процесса строительства пользовались только одной технологией, которая называется фотограмметрией. Это один из самых старых и проверенных методов бесконтактных трёхмерных измерений. Он позволяет определять пространственные координаты объекта по его фотографиям, сделанным с различных ракурсов. Фотограф приезжает на стройку и делает множество снимков поверхностей нужного объекта. Потом фотографии совмещаются и полученное изображение подвергается измерениям. Чтобы совмещение было как можно более точным, фотографу приходится снимать с перекрытием кадров на 60—80%. При этом он должен производить съёмку только в пасмурную погоду, чтобы избежать бликов от солнца и блестящих поверхностей.