Гуманоидов готовят к наступлению
Зачем люди создают антропоморфных роботов и стоит ли их бояться

Пока мир спорит о том, является ли искусственный интеллект злом или благом для человечества (все же ИИ создан для усиления, а в иных случаях и для замещения главного эволюционного преимущества Homo sapiens — его мозга), на сцену готовятся выйти человекоподобные роботы. Технооптимисты считают, что 2026 год станет переломным для этой индустрии. Главный футуролог планеты Илон Маск обещает начать производство целой армии гуманоидов, которые «перевернут рынок труда и освободят людей от тяжелой работы», а также «создадут условия для жизни на Марсе». С громким рыночным анонсом на днях выступил китайский стартап DroidUp: в Шанхае он презентовал новую модель готового к продаже гиперреалистичного робота по имени Moya, который обладает модульной архитектурой, что позволяет настраивать его внешность и гендерные признаки в зависимости от задач, и, как пишут разработчики, «способен проявлять широкий спектр человеческих чувств».
Каковы шансы этих странных эквивалентов людей вписаться в наш мир и чего ожидать от этой экспансии?
Уже не фантастика
К появлению человекоподобных роботов мир готовился более ста лет. Впервые слово «робот» прозвучало в чешском городе Градец-Кралове еще в 1921 году на премьере пьесы Карла Чапека R.U.R. — так в спектакле называли искусственное существо, похожее на человека и предназначенное для тяжелой работы. В 1927 году в фильме «Метрополис» робота впервые показали на экране. А в начале 1940-х фантаст Айзек Азимов «одушевил» роботов в своих фантастических романах и придумал знаменитые «три закона робототехники», которые позже учитывались при реальной работе над созданием искусственного интеллекта. На страницах его книг роботы прошли путь от комичных гротескных механических кукол до великолепного Р. Дэниела Оливо, неотличимого от человека внешне, но наделенного неизмеримо более могучим интеллектом.
Первые реальные роботы 1950–1960-х годов человека не напоминали — это были механические манипуляторы. В 1960-х начались эксперименты по созданию шагающих машин, а в 1973 году в токийском Университете Васэда появился WABOT-1 — первый полноценный антропоморфный робот, который ходил на двух ногах, брал предметы и общался на японском.
WABOT-1 намного опередил свое время, но массовым товаром так и не стал. Причина — в колоссальной сложности и стоимости технологий того периода. Компьютеры были слишком большими и маломощными, чтобы обеспечить автономную работу всех систем. Сервоприводы и сенсоры существовали только в единичных экземплярах, собирались вручную и требовали постоянного присмотра. В итоге первый человекообразный робот остался лабораторным проектом. Он доказал саму возможность создания двуногой машины, но не был готов к практическому использованию.
Следующие десятилетия ушли на накопление технологий: развитие микроэлектроники, появление компактных процессоров, литий-ионных батарей, точных датчиков. К 2000-м вычислительные мощности достигли уровня, позволяющего моделировать поведение роботов в виртуальной среде. Это стало поворотным моментом — теперь можно было учить машину ходить, бегать и сохранять равновесие не на реальных стендах (что требовало месяцев), а за считаные часы в цифровых симуляциях.
Новый век в робототехнике начала американская фирма Boston Dynamics, сумевшая применить накопленные знания на практике. В 2013 году эта компания показала Atlas — гидравлического робота, который бегал, прыгал, делал сальто и вставал после падения. Но это тоже был не слишком надежный выставочный экземпляр: компании понадобилось еще десять лет на то, чтобы довести свою машину до ума и сделать версию Atlas полностью электрической.
Параллельно развивалось направление Soft Robotics — «мягких» роботов из эластичных материалов, которые должны быть лучше приспособлены для взаимодействия с людьми и хрупкими объектами. Ведь в конечном счете человекоподобным роботам хотят поручить не только монотонную работу на складах, на упаковке и сортировке простых товаров, но и более изящные и разнообразные функции — работу в сфере услуг, полив цветов в доме, загрузку и разгрузку посудомоечных машин, сортировку белья и даже поддержку душевного разговора с хозяином. Считается, что для их выполнения хорошо подходит человеческий облик: ноги позволяют преодолевать препятствия, руки — брать и переносить предметы.
Стимулом для внедрения в разные сферы именно антропоморфных моделей становится и то, что под них не требуется кардинально перестраивать производственную инфраструктуру. Такие роботы могут эффективно работать в существующих человекоориентированных условиях как в качестве помощников людей, так и в роли исполнителей особых задач в опасных и труднодоступных средах.
Прогнозируется, что благодаря этой своей универсальности именно двуногие конструкции завоюют мир: к 2035 году, как предсказывает Research Nester, доля бипедальных машин превысит 52,3% от всех роботов. А их колесные собратья останутся в нишах, где нет лестниц и сложного рельефа.
Кто на рынке
В 2025 году объем мирового рынка человекоподобных роботов превысил 3,14 млрд долларов, всего было продано около 16 тыс. таких «игрушек» — это в семь с лишним раз больше, чем в 2024-м. К 2027 году аналитики ожидают роста этого рынка до 100 тыс. единиц.
Та же Boston Dynamics (работает в тандеме с Hyundai Motor) планирует ежегодно продавать 30 тыс. роботов Atlas; обосноваться на этом рынке намереваются американские фирмы Apptronik, Agility Robotics, а также стартап Figure (в партнерстве с BMW) и, конечно, Tesla, которая разрабатывает очень прагматичного робота Optimus (он же Tesla Bot) для логистики, складирования, розничной торговли и производства. Проекты по созданию антропоморфных роботов ведутся также в Японии, Южной Корее, Норвегии и России.
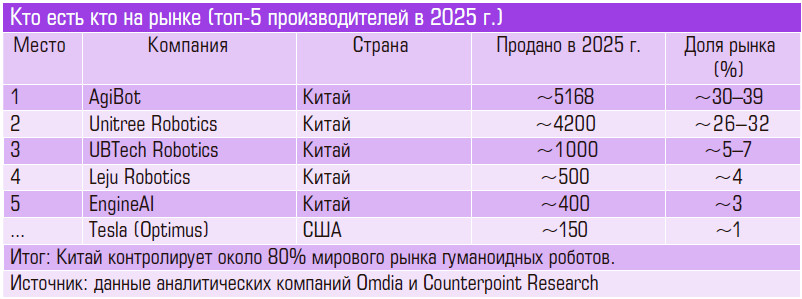
Открытием последних месяцев на рынке робототехники стали китайские разработки. Вчера еще никому не известные стартапы Unitree Robotics и AgiBot уже подвинули Tesla: каждая из компаний успела выпустить около 5000 человекообразных роботов, вместе они контролируют почти 60% глобального рынка. Такой рывок объясняется в первую очередь государственной поддержкой («воплощенный интеллект» признан одним из приоритетных направлений в рекомендациях к 15-му пятилетнему государственному плану развития КНР), а также мощной производственной базой Поднебесной и позитивным информационным шумом. Роботы в Китае уже дают концерты, поступают, пока еще в экспериментальном режиме, в академии и учатся на правах обычных студентов; в Пекине также проводятся всемирные игры человекоподобных роботов.

«В КНР, например, уже довольно давно по телевидению показывают соревнования: что лучше может сделать человек, а что — робот. Это отдельная государственная политика — освещать возможности применения робототехники», — отмечает в разговоре с «Моноклем» Алиса Конюховская, эксперт в робототехнике, основатель RoboJobs и Shenzhen Alisa Robot Technology Ltd.
Несмотря на то что все анонсированные машины, как уверяют их производители, фактически готовы к продажам, на практике ожидание их выхода на рынок несколько затягивается. Так, Илон Маск не выполнил свое обещание представить новую модификацию робота Optimus-3 к концу 2025 года, а в январе 2026-го, выступая на Всемирном экономическом форуме в Давосе, заявил, что публичные продажи Optimus начнутся только тогда, когда Tesla убедится в их надежности. По его словам, это произойдет к концу следующего года и сначала производство будет «чрезвычайно медленным». Тем не менее компания намерена со временем производить миллион экземпляров в год. Для этого Tesla остановит выпуск своих люксовых электромобилей Model S и Model X, чтобы перепрофилировать завод в Калифорнии под выпуск Optimus.
Как это сделано
Тормозят внедрение механических людей в нашу жизнь все еще высокая стоимость их компонентов и некоторые технические сложности. Современный человекоподобный робот представляет собой синтез механики, электроники и искусственного интеллекта. Его каркас обычно делают из алюминиевых сплавов или углеродного волокна — это дает прочность при минимальном весе. Внешнее покрытие может быть пластиковым или силиконовым, как у Moya, что делает их весьма похожими на настоящих людей. В Soft Robotics используются эластомеры и материалы с эффектом памяти формы. За работу мышц отвечают в основном электрические сервоприводы (используются в новых версиях роботов Atlas, Optimus, Moya) либо более мощные, но шумные гидравлические приводы; тестируются также пневматические приводы. Чтобы видеть и чувствовать мир, робот оснащается камерами; чтобы рассчитывать траекторию движения — лидарами; для поддержки баланса — гироскопами и акселерометрами; для регулировки силы захвата — тактильными датчиками.
Самая уязвимая часть тела робота — руки: сделать их столь же чувствительными и ловкими, как человеческие, пока не получается. Человеческая кисть — это чудо эволюции: огромное количество мышц, сухожилий и нервных окончаний. Воспроизвести такую сложность в металле и пластике невероятно трудно. Каждый дополнительный сустав требует отдельного привода, что увеличивает вес, энергопотребление и сложность управления. Компромиссные решения с меньшим числом пальцев или движений упрощают конструкцию, но снижают функциональность.