Орбитальные группировки навигационных спутников
Зародившись из потребностей военных ведомств, спутниковая навигация сегодня плотно вошла в наш быт

Первые идеи навигации при помощи космических аппаратов высказывались еще во второй половине 1950-х. Американцы, слушая передачи первого советского спутника, заметили, что из-за эффекта Доплера частота принимаемого сигнала увеличивается при приближении космического аппарата и уменьшается при отдалении. Используя это явление и зная собственные координаты на земле, можно определить положение и скорость спутника, и наоборот – зная положение спутника, можно вычислить свою скорость и координаты.
Первые специализированные космические навигационные системы создавались в 1960-х годах в интересах военно-морских сил США и СССР. С тех пор собственная спутниковая навигация стала признаком государственного суверенитета, а также символом технологической и финансовой состоятельности державы. В настоящее время работают семь спутниковых навигационных систем – четыре глобальные (российская ГЛОНАСС, американская GPS, европейская Galileo и китайская Beidou), а также три региональные (индийские NAvIC и GAGAN, а также японская QZSS). Французское оборудование для точного определения орбиты и радиопозиционирования DORIS устанавливается на неспециализированные европейские спутники. Указанные навигационные системы имеют «национальные» особенности, но работают по схожим принципам, а их структура, как правило, сопоставима.
Принципы построения
Спутниковые навигационные системы состоят из трех основных сегментов: космического, управляющего и пользовательского. Навигационные спутники на околоземных орбитах составляют космический сегмент, а станции контроля и наземные антенны – управляющий. Пользовательский сегмент представлен приемными устройствами, которые используют сигналы спутников для определения собственного местоположения в режиме реального времени.
Спутниковая навигация строится на беззапросном принципе: пользовательский терминал ничего не передает, а лишь принимает непрерывный сигнал от навигационных спутников. В сигнале закодированы координаты космического аппарата, непрерывно рассчитываемые по законам небесной механики, и время отправки сигнала. Терминал принимает эти данные и рассчитывает расстояние до каждого спутника путем умножения скорости света на разницу между временем получения и временем отправки сигнала.

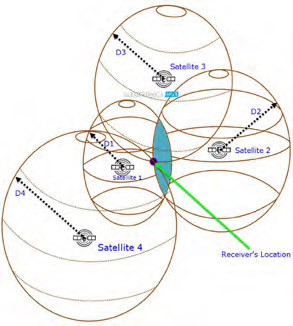
Имея данные от трех (а лучше четырех) спутников, методом триангуляции можно вычислить координаты пользователя. По расстоянию лишь до одного космического аппарата сделать это нельзя – приемник может находиться в любой точке сферы вокруг спутника. Данные от второго аппарата сужают область нахождения приемника до окружности. Информация третьего спутника дает наличие двух точек, одна из которых лежит на поверхности, вторая либо в небе, либо прямо под землей. И только данные четвертого спутника позволяют однозначно определить координаты.
Кроме того, часы пользовательского терминала измеряют время иначе, чем бортовой «хронометр» космического аппарата. Для учета разницы также служит четвертый спутник. А для определения своего положения круглосуточно и в любой точке Земли необходимо развернуть орбитальную группировку, состоящую из нескольких десятков спутников, расположенных в нескольких орбитальных плоскостях.
Параметры орбиты выбираются из технико-экономических и функциональных соображений. Если размещать спутники на низкой орбите, то каждый будет иметь небольшую зону видимости, а для глобального покрытия потребуются сотни космических аппаратов. Кроме того, низкие орбиты подвержены возмущениям от гравитации Луны и Солнца, сопротивления атмосферы и солнечного ветра и т.п. Это снижает точность навигации.
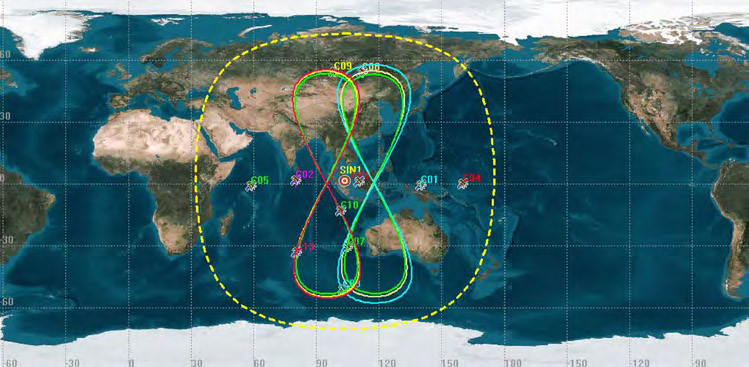
Можно вывести навигационные аппараты на геостационарную орбиту, лежащую в плоскости экватора на высоте около 36 000 км. Для глобальной навигации потребуется всего три спутника. Однако геостационар плохо виден из околополярных регионов. Устранить этот недостаток можно, запуская аппараты на квазизенитную орбиту высотой 36 000 км, но с большим наклонением к экваториальной плоскости. Здесь спутник не останется неподвижно «висеть» над определенной точной экватора, а будет описывать «восьмерки», выполняя один виток за сутки.
Но запуски космических аппаратов на орбиты высотой 36 000 км обходятся значительно дороже, чем на низкие или средние орбиты, поскольку требуют тяжелых ракет-носителей. К тому же геостационар плотно заселен многочисленными телекоммуникационными спутниками, и найти там свободное место становится сложно. Тем не менее в некоторых навигационных созвездиях присутствует высотный сегмент, расширяя функционал систем определения местоположения наземных объектов.
Компромиссным решением, оптимальным по соотношению «эффективность/стоимость», оказалось размещение навигационных космических аппаратов на средневысотных орбитах с наклонением 55-65°. Зона обзора отсюда гораздо больше, чем для низковысотных спутников; можно и наблюдать аппараты из приполярных районов. Кроме того, выбранные высота и наклонение обеспечивают минимальные суммарные возмущения орбиты, повышая стабильность положения спутников и точность навигации.
Американская GPS
Система глобального позиционирования GPS (Global Positioning System) исторически первой стала применяться в масштабах всего земного шара. Ей предшествовала навигационная система Transit, которая проектировалась с 1958 года для использования в оперативном режиме: стратегическим атомным субмаринам ВМС США требовалось навигационное обеспечение пусков ракет Polaris. Группировка Transit, развертывание которой началось в 1964 году, просуществовала до 1996 года: пять-шесть космических аппаратов, работая одновременно на орбитах высотой 1000 км, обеспечивали точность определения координат до 200 м.
В 1973 году по заказу Пентагона началась разработка космического комплекса для решения задач «по определению местоположения и синхронизации шкал времени» NAVSTAR (NAVigation System with Time And Ranging). Архитектура системы, сформулированная через год, включала группировку из 24 спутников, размещаемых на орбитах высотой 20200 км и наклонением 63° в трех орбитальных плоскостях. Первый спутник был запущен в 1978 году.

К концу 1980-х было решено изменить наклонение орбиты до 55°, а количество плоскостей увеличить с трех до шести. В таком виде эта архитектура сохранилась до сих пор.
В 1993 году группировка GPS достигла штатного состава в 24 спутника, а через два года была принята на вооружение.
За десять лет до этого над Сахалином был сбит Boeing 747-230B авиакомпании Korean Air Lines (KAL), выполнявший плановый рейс по маршруту Нью-Йорк–Анкоридж–Сеул, якобы «заблудившийся» и глубоко вторгшийся в воздушное пространство СССР. Во избежание подобных инцидентов президент США Рональд Рейган предложил ограниченно использовать систему GPS для гражданских целей, как только она полностью войдет в строй. Это произошло уже в 1993 году. При этом точность навигации для гражданских целей загрублялась с помощью специального алгоритма до 100 м вместо возможных 10.