Роботы-манипуляторы: от самодельной руки до промышленных коботов

Робот-манипулятор – это механическая рука с функциями, схожими с человеческой рукой. Такие устройства сегодня встречаются повсюду: от небольших самодельных моделей на столе энтузиаста до огромных промышленных агрегатов, собирающих автомобили.
Сегодня мы рассмотрим, как устроены манипуляторы, как можно сделать простейшего робота своими руками, разберемся в основах кинематики и управления, а также познакомимся с современными промышленными и коллаборативными роботами и их разнообразными способами применения – от производства до искусства и сферы услуг.
Простейший манипулятор
Начать знакомство с роботами-манипуляторами лучше всего с простых моделей, которые даже можно собрать самостоятельно. Как правило, самодельный манипулятор представляет собой небольшую роборуку с несколькими степенями свободы, приводимую в движение сервоприводами. И вот тут, когда произнесено уже достаточно много непонятных слов, разберемся с терминологией.
Толковый словарь: как устроен манипулятор?
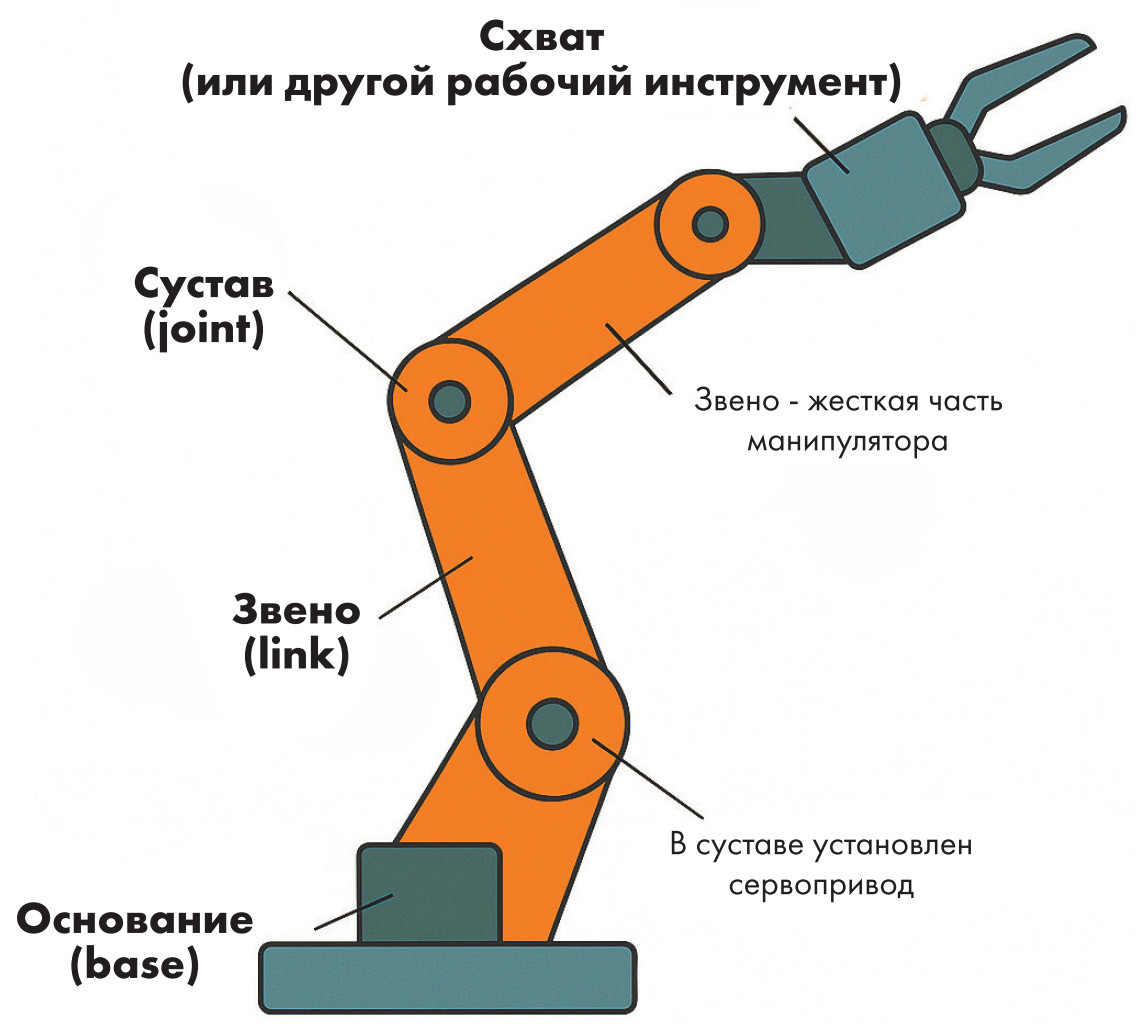
Основание – место установки манипулятора. Вокруг основания манипулятор, как правило, вращается по вертикальной оси.
Звено – это «кость» робота, то есть жесткий элемент между двумя подвижными соединениями. Аналогия: плечо или предплечье.
Сустав – место соединения двух звеньев, позволяющее им двигаться относительно друг друга. Например, локоть – это сустав между плечом и предплечьем. Степень свободы (DoF) – независимое направление движения. Каждый сустав обычно дает одну степень свободы: поворот или поступательное движение. Чем больше степеней свободы, тем подвижнее манипулятор.
Сервопривод – компактный мотор с редуктором и системой обратной связи (датчиком положения), который позволяет точно управлять углом поворота звена. Именно он «оживляет» суставы робота.
Конструкция
Базовая схема манипулятора обычно включает основание (поворот вокруг вертикальной оси), «плечо» и «локоть» для движения в вертикальной плоскости и «запястье», или схват (захват) на конце для выполнения действий. Каждое подвижное соединение оснащается сервоприводом – небольшим мотором с редуктором и встроенным датчиком положения. Простые сервомоторы (часто используемые в авиа и автомоделизме) управляются очень просто – широтно-импульсным сигналом от микроконтроллера, где длительность импульса задает угол поворота.
Благодаря этому даже новичок может заставить такую роборуку двигаться, используя готовые библиотеки (например, Arduino имеет библиотеку Servo для управления несколькими сервоприводами одновременно).
Важно отметить, что питание сервомоторов требует учета их тока. Плата Arduino не может запитать сразу много серв напрямую: при попытке подключить несколько сервоприводов к 5В выводу контроллера напряжение проседает. Поэтому обычно используют отдельный источник питания (например, батарейный отсек или сетевой адаптер + стабилизатор на 5 В) для моторчиков, объединив общие земли с контроллером. Такая схема позволяет избежать перегрузки регулятора напряжения на плате и обеспечить стабильную работу всех приводов.
Статья автора о работе с сервоприводами от простого к сложному:
https://t.me/burmistrov_robotics/136
Сборка и примеры
Существует множество любительских проектов по сборке простых манипуляторов. Например, энтузиасты создают 3–4 осевые манипулятора из фанеры или пластика, используя доступные сервы. В сети можно найти инструкции, как сделать несложный манипулятор из деревянных реек и сервоприводов буквально «на коленке». Часто применяют детали, напечатанные на 3D-принтере, либо готовые наборы сочленений.
Классический учебный пример – манипулятор, способный перемещать небольшие предметы с места на место или даже писать ручкой по бумаге. Конечно, точность таких самоделок невысока, но для ознакомления этого достаточно. Используя более качественные сервомоторы и продуманную конструкцию, можно достичь лучшей точности и грузоподъемности.
Кинематика: сколько осей нужно роботу?
Манипулятор состоит из сегментов (звеньев), соединенных подвижными суставами – в итоге они образуют кинематическую цепь. Число подвижных сочленений определяет количество степеней свободы (DoF), то есть независимых направлений движения. Например, у человеческой руки, если считать от плеча до запястья, можно выделить не менее семи степеней свободы (повороты в плече по трем осям, сгибание в локте, повороты кисти и т.д.). У робота-манипулятора обычно меньше: распространены 4-осевые, 5-осевые и 6-осевые конструкции.
Шестью степенями свободы обладает так называемая полностью управляемая рука, способная достичь произвольного положения и ориентации захвата в пространстве. Именно 6 вращательных суставов имеют классические промышленные роботы, что примерно соответствует «плечу», «локтю» и «запястью» человека. Если степеней свободы меньше, манипулятору будет недоступна какая-то ориентация (скажем, 4-осевой не может наклонять захват под любым углом). С другой стороны, избыточные степени свободы (более 6) дают роботу большую гибкость: он может, к примеру, обходить препятствия разными конфигурациями или фиксировать позицию схвата, меняя позу «локтя» и т.п. (аналогично тому, как человек может дотянуться до объекта разными движениями руки).
Понимание кинематики – ключ к управлению роботом. Прямая кинематика относительно проста: зная углы поворота всех суставов, можно вычислить, где находится «рука» робота (захват). Для этого достаточно последовательно применить геометрические преобразования для каждого звена. Гораздо сложнее