Бинокулярный радар помог беспилотному автомобилю четко видеть сквозь туман
Инженеры создали радарную систему для беспилотных автомобилей, которая позволяет надежно определять положение и ориентацию других машин на дороге даже в условиях нулевой видимости — в туман, пыль и дождь. Это достигается за счет использования двух разнесенных радаров, их данные объединяются алгоритма, который отфильтровывает шумы, после чего другой алгоритм, основанный на методах машинного обучения, определяет точные габариты автомобилей. Статья опубликована в сборнике материалов конференции SenSys ’20: Proceedings of the 18th Conference on Embedded Networked Sensor Systems.
Современные беспилотные автомобили следят за дорогой с помощью видеокамер, лидаров и радаров. Лидар позволяет точно определять расстояние до объектов или даже строить точные рельефные карты пространства, но дымка, туман и пыль создают существенные помехи, поскольку эффективная работа сенсора напрямую зависит от прозрачности окружающей среды. Кроме лидара от плохой погоды также страдают и камеры.
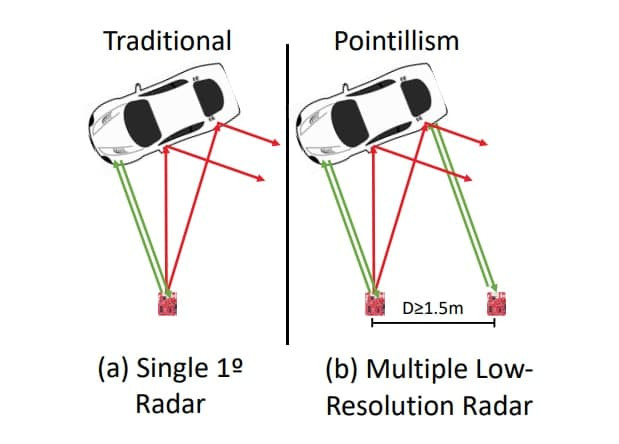
Радару туман не помеха, но информация с него позволяет построить изображение лишь приблизительно, оно отображает только нечеткие силуэты, состоящие из небольшого набора точек. Дело в том, что радиоволны распространяются не как свет, который отражается от поверхности во все стороны: в случае падения под острым углом сигнал отразится в сторону от источника, и назад почти ничего не вернется — поэтому, например, радар увидит переднюю часть встречной машины, но не увидит боковую, который зафиксируют камеры и лидары. Кроме того, из-за использования миллиметровых волн (существенно длиннее лазера) радиоизображение